Verifiable Perception and Navigation
Main content start
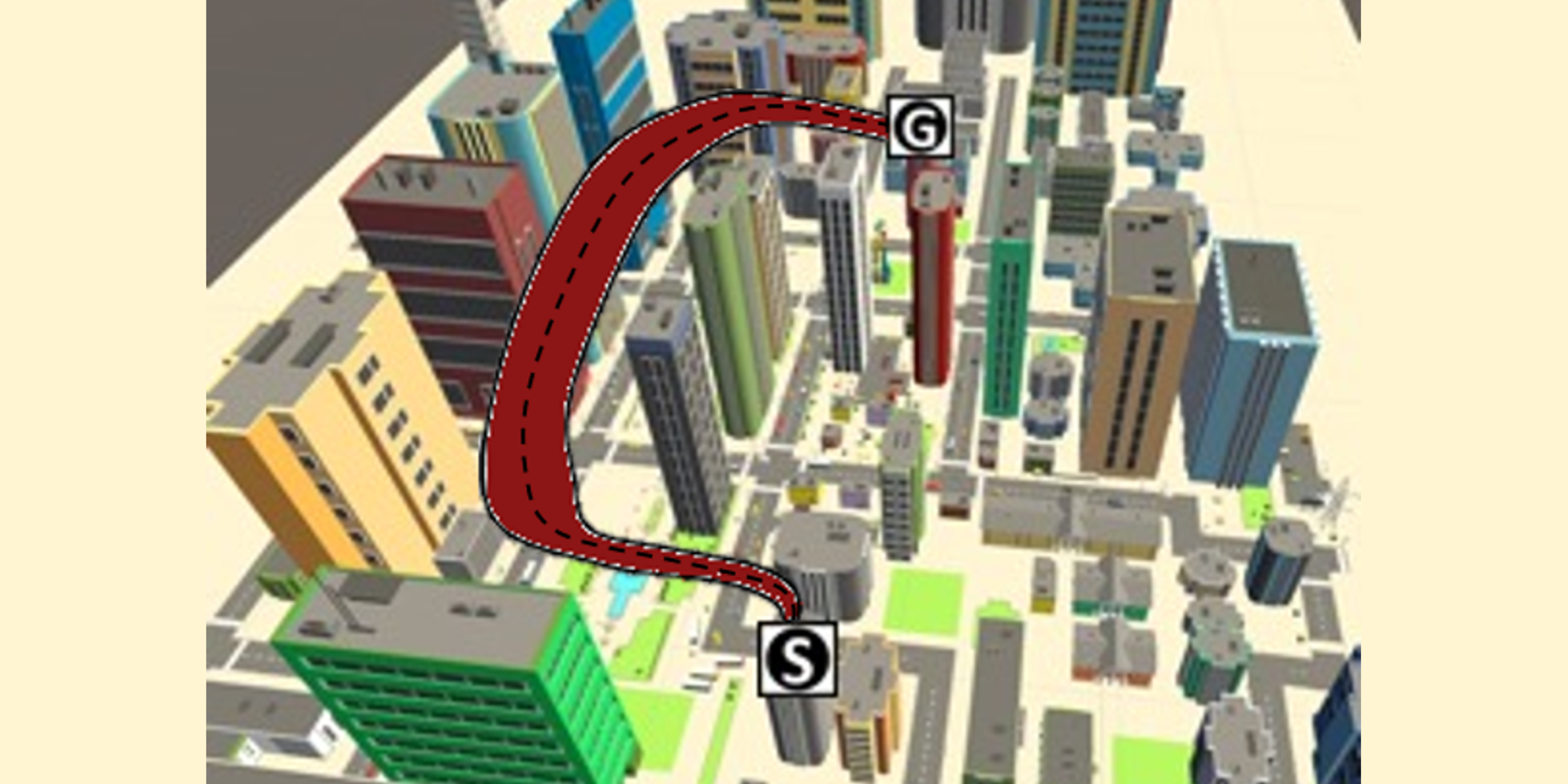
Research Question: How to Safely Plan the Vehicle Paths with Sensing Uncertainty?
Autonomous vehicles often operate in complex environments with various sensing uncertainties. For example, GPS signals can be blocked or reflected by buildings. Additionally, camera sensor measurements are susceptible to lighting conditions and yield poor vision performance in environments which lack distinguishing features. We aim to provide safe vehicle path-planning against sensing errors and uncertainties. We not only monitor sensing uncertainties, but also predict the characteristics of these uncertainties based on vehicle dynamics as well as environmental information, such as 3D maps. We apply formal methods, such as stochastic reachability to provide provable navigation safety guarantees.
Current Research Team:
- Adam Dai
- Asta Wu
- Tara Mina
- Ashwin Kanhere
- Derek Knowles
- Adyasha Mohanty
- Anonto Zaman
Related Works:
- Tara Mina, Ashwin Kanhere, Akshay Shetty, and Grace Gao, GPS Spoofing-Resilient Filtering Using Self-Contained Sensors and Chimera Signal Enhancement, Navigation: Journal of the Institute of Navigation. June 2024, 71 (2) navi.636; DOI: 10.33012/navi.636. [paper]
- Tara Mina, Ashwin Kanhere, Shreyas Kousik and Grace Gao, Stochastic Reachability-based GPS Spoofing Detection with the Chimera Signal Enhancement, Navigation: Journal of the Institute of Navigation. December 2023, 70 (4) navi.616; DOI: 10.33012/navi.616. [paper]
- Asta Wu, Adyasha Mohanty, Anonto Zaman, and Grace Gao, Bounding GPS-Based Positioning and Navigation Uncertainty for Autonomous Drifting via Reachability, Proceedings of the Institute of Navigation GNSS+ conference (ION GNSS+ 2023), Denver, CO, Sep 2023. Best Presentation of the Session Award. [paper] [slides]
- Derek Knowles and Grace Gao, Detection and Exclusion of Multiple Faults using Euclidean Distance Matrices, Proceedings of the Institute of Navigation GNSS+ conference (ION GNSS+ 2023), Denver, CO, Sep 2023, Best Presentation of the Session Award. [paper] [slides] [video]
- Ashwin V. Kanhere and Grace Gao, Fault-Robust GPS Spoofing Mitigation with Expectation-Maximization, Proceedings of the Institute of Navigation GNSS+ conference (ION GNSS+ 2023), Denver, CO, Sep 2023, Best Presentation of the Session Award. [paper] [slides] [video]
- Sriramya Bhamidipati and Grace Gao, Networked Timing Risk Analysis Against GPS Spoofing via Stochastic Reachability in PMUs, Navigation: Journal of the Institute of Navigation. September 2023, 70 (3) navi.574; DOI: https://doi.org/10.33012/navi.574. [paper]
- Derek Knowles and Grace Gao, Euclidean Distance Matrix-based Rapid Fault Detection and Exclusion, Navigation: Journal of the Institute of Navigation. vol. 70, no. 1, Mar 2023, DOI: https://doi.org/10.33012/navi.555. [paper] [video]
- Tara Mina, Ashwin Kanhere, Akshay Shetty and Grace Gao, GPS Spoofing-Resilient Filtering with Chimera and Self-Contained Odometry, Proceedings of the Institute of Navigation GNSS+ conference (ION GNSS+ 2022), Denver, CO, Sep 2022. [paper] [slides] [video]
- Ashwin V. Kanhere, Tara Mina, Akshay Shetty, and Grace Gao, Factor Graph-based Spoofing Mitigation using the Chimera Signal Enhancement, Proceedings of the Institute of Navigation GNSS+ conference (ION GNSS+ 2022), Denver, CO, Sep 2022. [paper] [slides] [video]
- Tara Mina, Ashwin V. Kanhere, Shreyas Kousik and Grace Gao, Continuous GPS Authentication with Chimera using Stochastic Reachability Analysis, Proceedings of the Institute of Navigation GNSS+ conference (ION GNSS+ 2021), St. Louis, MO, Sep 2021. [paper] [slides] [video]
- Shreyas Kousik, Adam Dai and Grace Gao, Ellipsotopes: Combining Ellipsoids and Zonotopes for Reachability Analysis and Fault Detection, IEEE Transactions on Automatic Control, 2022, doi: 10.1109/TAC.2022.3191750. [paper]
- Akshay Shetty, Adam Dai, Alexandros Tzikas and Grace Gao, Safeguarding Learning-Based Planners Under Motion and Sensing Uncertainties Using Reachability Analysis, IEEE International Conference on Robotics and Automation (ICRA) 2023. [paper] [video]
- Amr Alanwar, Mahmoud Selim, Shreyas Kousik, Grace Gao, Marco Pavone and Karl H. Johansson, Safe Reinforcement Learning Using Black-Box Reachability Analysis, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2022. [paper]
- Akshay Shetty and Grace Gao, Predicting State Uncertainty Bounds Using Non-linear Stochastic Reachability Analysis for Urban GNSS-based UAS Navigation, IEEE Intelligent Transportation Systems, vol. 22, no. 9, pp. 5952-5961, Sept. 2021.doi: 10.1109/TITS.2020.3040517. [paper]
- Long Kiu Chung*, Adam Dai*, Derek Knowles, Shreyas Kousik and Grace Gao, Constrained Feedforward Neural Network Training via Reachability Analysis, Robotics: Science and Systems (RSS 2021) Robotics for People (R4P) Workshop, Jul 2021. [paper]
- Akshay Shetty and Grace Gao, Trajectory Planning Under Stochastic and Bounded Sensing Uncertainties Using Reachability Analysis, Proceedings of the Institute of Navigation GNSS+ conference (ION GNSS+ 2020), St. Louis, MO, Sep 2020. [paper] [slides] [video]
- Sriramya Bhamidipati and Grace Gao, Integrity-driven Landmark Attention for GPS-Vision Navigation via Stochastic Reachability, Proceedings of the Institute of Navigation GNSS+ conference (ION GNSS+ 2020), St. Louis, MO, Sep 2020. [paper] [slides] [video]
- Akshay Shetty and Grace Gao, Predicting State Uncertainty for GNSS-based UAV Path Planning Using Stochastic Reachability, Proceedings of the Institute of Navigation GNSS+ conference (ION GNSS+ 2019), Miami, FL, Sep 2019. [paper] [slides]