Trustworthy and Effective Deep Learning for Vehicle Localization
Research Question: How to Achieve Trust and Effectiveness with Deep Learning for Vehicle Localization?
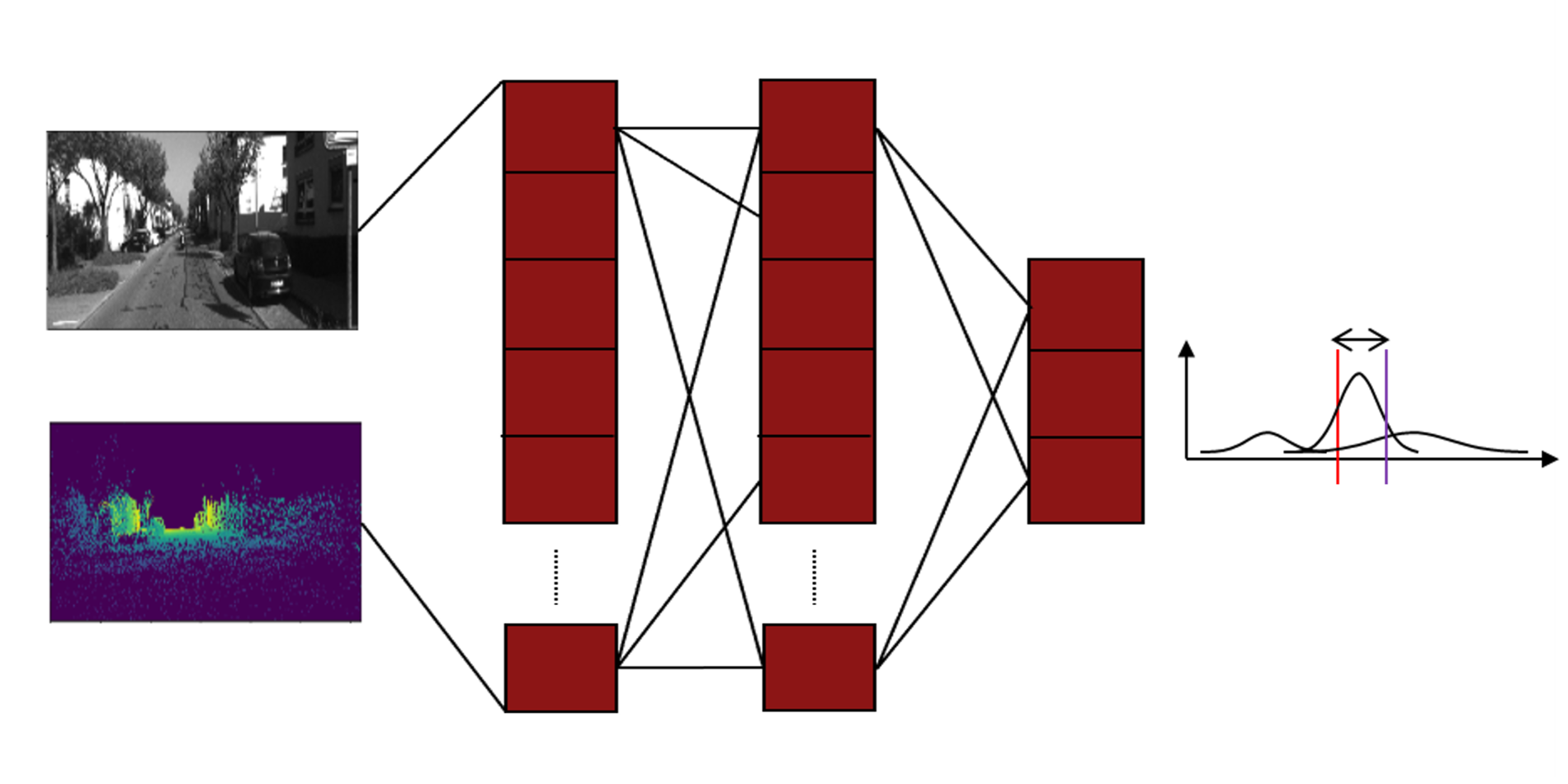
Deep learning is a powerful tool for perception and localization for autonomous vehicles. At the same time, deep learning programs are often black boxes, with complex networks that lead to opaque methods of decision making which may fail unexpectedly. In addition, deep learning methods are often data-hungry: they require high computation to train, and lack of training data may lead to erroneous or non-converging results. We aim to provide trustworthiness and robustness alongside deep learning approaches, by training the deep learning network to learn the sensing uncertainties and by utilizing deep learning as an additional sensor processing tool. Furthermore, we leverage the wealth of physical knowledge (e.g. GPS satellite geometry) to perform physics-informed machine learning for improving the effectiveness of machine learning models. By integrating deep learning with model-driven approaches, we use the learned sensing uncertainty to better quantify pose estimation uncertainty and provide protection levels for guaranteed safe navigation.
Current Research Team:
- Shubh Gupta
- Adyasha Mohanty
- Adam Dai
- Mira Partha
- Daniel Neamati
- Ashwin Kanhere
Related Works:
- Adyasha Mohanty and Grace Gao, Tightly Coupled Graph Neural Network and Kalman Filter for Improving Smartphone GNSS Positioning, Proceedings of the Institute of Navigation GNSS+ conference (ION GNSS+ 2023), Denver, CO, Sep 2023, Best Presentation of the Session Award. [paper] [slides] [video]
- Daniel Neamati, Shubh Gupta, Mira Partha, and Grace Gao, Neural City Maps for GNSS NLOS Prediction, Proceedings of the Institute of Navigation GNSS+ conference (ION GNSS+ 2023), Denver, CO, Sep 2023. Best Presentation of the Session Award. [paper] [slides] [video]
- Mira Partha, Shubh Gupta, and Grace Gao, Neural City Maps: A Case for 3D Urban Environment Representations Based on Radiance Fields, Proceedings of the Institute of Navigation GNSS+ conference (ION GNSS+ 2023), Denver, CO, Sep 2023, Best Presentation of the Session Award. [paper] [slides] [video]
- Adam Dai, Shubh Gupta, and Grace Gao, Neural Radiance Maps for Extraterrestrial Navigation and Path Planning, Proceedings of the Institute of Navigation GNSS+ conference (ION GNSS+ 2023), Denver, CO, Sep 2023. [paper] [slides]
- Akshay Shetty, Adam Dai, Alexandros Tzikas and Grace Gao, Safeguarding Learning-Based Planners Under Motion and Sensing Uncertainties Using Reachability Analysis, IEEE International Conference on Robotics and Automation (ICRA) 2023. [paper] [video]
- Adyasha Mohanty and Grace Gao, High-Precision Positioning with Smartphone Measurements: Learning GNSS Positioning Corrections using Graph Convolution Neural Networks, Inside GNSS Magazine, May-June 2023. [pdf]
- Ashwin Kanhere*, Shubh Gupta*, Akshay Shetty and Grace Gao, Improving GNSS Positioning using Neural Network-based Corrections, Navigation: Journal of the Institute of Navigation. December 2022, 69 (4) navi.548; DOI: https://doi.org/10.33012/navi.548. [paper] [video]
- Adyasha Mohanty and Grace Gao, Learning GNSS Positioning Corrections for Smartphones using Graph Convolution Neural Networks, Proceedings of the Institute of Navigation GNSS+ conference (ION GNSS+ 2022), Denver, CO, Sep 2022. [paper] [slides] [video]
- Shubh Gupta, Ashwin V. Kanhere, Akshay Shetty, and Grace Gao, Designing Deep Neural Networks for Sequential GNSS Positioning, Proceedings of the Institute of Navigation GNSS+ conference (ION GNSS+ 2022), Denver, CO, Sep 2022. Best Presentation of the Session Award. [paper] [slides] [video]
- Amr Alanwar, Mahmoud Selim, Shreyas Kousik, Grace Gao, Marco Pavone and Karl H. Johansson, Safe Reinforcement Learning Using Black-Box Reachability Analysis, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2022. [paper]
- Adyasha Mohanty and Grace Gao, A Particle Filtering Framework for Tight GNSS-Camera Fusion using Convolutional Neural Networks, Proceedings of the Institute of Navigation GNSS+ conference (ION GNSS+ 2021), St. Louis, MO, Sep 2021. [paper][slides] [video]
- Ashwin V. Kanhere*, Shubh Gupta*, Akshay Shetty and Grace Gao, Improving GNSS Positioning using Neural Network-based Corrections, Proceedings of the Institute of Navigation GNSS+ conference (ION GNSS+ 2021), St. Louis, MO, Sep 2021. [paper] [slides] [video] [code]
- Shubh Gupta and Grace Gao, Data-Driven Protection Levels for Camera and 3D Map-based Safe Urban Localization, Navigation: Journal of the Institute of Navigation. vol. 68, no. 3, pp. 643-660, Sept. 2021. doi: 10.1002/navi.445. [paper][video]
- Long Kiu Chung*, Adam Dai*, Derek Knowles, Shreyas Kousik and Grace Gao, Constrained Feedforward Neural Network Training via Reachability Analysis, Robotics: Science and Systems (RSS 2021) Robotics for People (R4P) Workshop, Jul 2021. [paper]
- Shubh Gupta and Grace Gao, Data-Driven Protection Levels for Camera and 3D Map-based Safe Urban Localization, Proceedings of the Institute of Navigation GNSS+ conference (ION GNSS+ 2020), St. Louis, MO, Sep 2020. doi: 10.33012/2020.17698. [paper] [slides] [video]
- Adyasha Mohanty, Shubh Gupta and Grace Gao, A Particle Filtering Framework for Integrity Risk of GNSS-Camera Sensor Fusion, Proceedings of the Institute of Navigation GNSS+ conference (ION GNSS+ 2020), St. Louis, MO, Sep 2020. [paper][slides] [video]
- Akshay Shetty and Grace Gao, UAV Pose Estimation Using Cross-view Geolocalization with Satellite Imagery, Proceedings of the 2019 IEEE International Conference on Robotics and Automation (ICRA), Montreal, Canada, May 2019. [paper] [video] [data]